

|
|
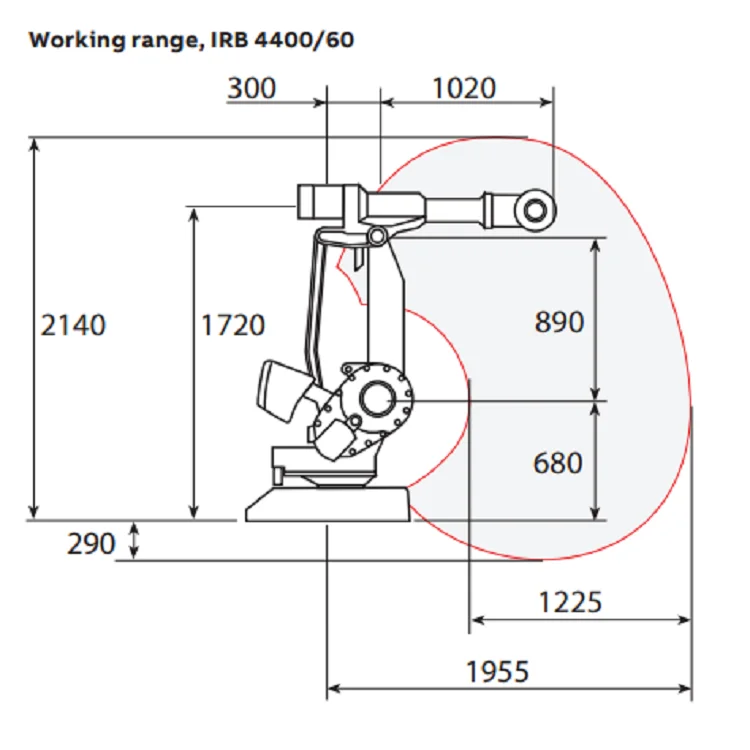
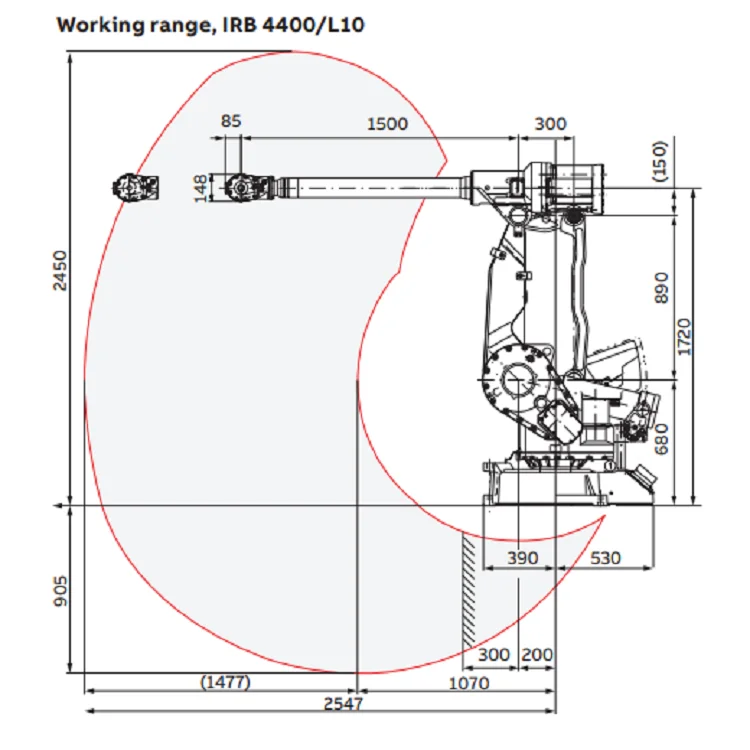
선 추적자와 산업적 도장용 로봇 팔 ABB IRB4400 6 주축 CNC (컴퓨터에 의한 수치제어) 로봇 팔과 로봇 커버와 선 추적자

| 로봇 버전 | (m)에 도달하세요 | 화물 (킬로그램) | ||
| IRB 4400-60/1.96 | 1.96 | 60 | ||
| IRB 4400L-10/2.53 | 2.53 | 10 | ||
| 보충적 로드 | ||||
| 주축 2에 | 35 킬로그램 | |||
| 주축 3에 | 15 킬로그램 | |||
| 주축 4에 | 0-5 킬로그램 | |||
| 감원의 수 | 6 | |||
| 보호 | 세척할 수 있는 표준 버전 IP 54, 주조공장 플러스 2 IP 67과 고압 증기 | |||
| 장착 | 바닥 | |||
| 제어기 | IRC5 단일 캐비닛 | |||
| 통합된 신호 공급 | 23개 신호와 10 전원 켬 상완 | |||
| 통합된 급기 | 맥스. 상완 위의 8개 바 | |||
| 로봇 버전 | 위치 반복성 RP (밀리미터) | 경로 반복도 RT (mm)* : |
| IRB 4400-60/1.96 | 0.06 | 0.09 |
| IRB 4400L-10/2.53 | 0.05 | 0.16 |

|
|
선 추적자와 산업적 도장용 로봇 팔 ABB IRB4400 6 주축 CNC (컴퓨터에 의한 수치제어) 로봇 팔과 로봇 커버와 선 추적자
| 로봇 버전 | (m)에 도달하세요 | 화물 (킬로그램) | ||
| IRB 4400-60/1.96 | 1.96 | 60 | ||
| IRB 4400L-10/2.53 | 2.53 | 10 | ||
| 보충적 로드 | ||||
| 주축 2에 | 35 킬로그램 | |||
| 주축 3에 | 15 킬로그램 | |||
| 주축 4에 | 0-5 킬로그램 | |||
| 감원의 수 | 6 | |||
| 보호 | 세척할 수 있는 표준 버전 IP 54, 주조공장 플러스 2 IP 67과 고압 증기 | |||
| 장착 | 바닥 | |||
| 제어기 | IRC5 단일 캐비닛 | |||
| 통합된 신호 공급 | 23개 신호와 10 전원 켬 상완 | |||
| 통합된 급기 | 맥스. 상완 위의 8개 바 | |||
| 로봇 버전 | 위치 반복성 RP (밀리미터) | 경로 반복도 RT (mm)* : |
| IRB 4400-60/1.96 | 0.06 | 0.09 |
| IRB 4400L-10/2.53 | 0.05 | 0.16 |

